Hình chiếu, bản đồ kết cấu với Camera đo chiều sâu Intel RealSense
(Cập nhật: 11/20/2020 10:32:19 AM)
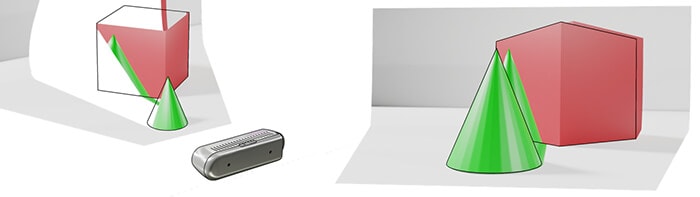
Để hiểu môi trường 3D của vật thể, Máy ảnh độ sâu Intel® RealSense ™ kết hợp thông tin từ nhiều cảm biến bên trong.
Khi nhìn vào một máy ảnh như Intel RealSense Depth Camera, có thể dễ dàng quên rằng mặc dù nó là một thiết bị duy nhất, nhưng các máy ảnh được tạo thành từ nhiều cảm biến khác nhau. Trong trường hợp của camera âm thanh nổi, chúng bao gồm hai cảm biến hình ảnh hồng ngoại gần, một bộ phát hồng ngoại và một cảm biến RGB. Trong trường hợp của máy ảnh LiDAR L515, nó có một bộ phát và cảm biến cho ánh sáng laser và một cảm biến RGB được đặt ở trên. Khi bạn chụp ảnh bằng bất kỳ máy ảnh nào, đối với mỗi điểm, dữ liệu bạn nhận được bao gồm nhiều phần thông tin khác nhau từ tất cả các cảm biến này được kết hợp với nhau.
Đối với một điểm trong không gian, nó sẽ có vị trí liên quan (khoảng cách từ máy ảnh) và thông tin về màu sắc. Dữ liệu màu đến từ cảm biến RGB đến từ một vị trí hơi khác so với thông tin về độ sâu, vì vậy, có những trường hợp các đối tượng chồng chéo hoặc bị che khuất có thể có dữ liệu màu bị tràn hoặc chiếu lên bề mặt sai, như bạn có thể thấy trong phần này tổng hợp cảnh ví dụ dưới đây.
Nguồn: Intel
Quý khách vui lòng liên hệ với BrandPC để chúng tôi được phục vụ:
 BrandPC - Cung cấp giải pháp - công nghệ dành cho doanh nghiệp
BrandPC - Cung cấp giải pháp - công nghệ dành cho doanh nghiệp
 Số 76 ngõ 120 Yên Lãng, Đống Đa, Hà Nội
Số 76 ngõ 120 Yên Lãng, Đống Đa, Hà Nội
 Hotline: 0888 627 888
Hotline: 0888 627 888
 Website: http://www.brandpc.vn/
Website: http://www.brandpc.vn/
Tin tức khác
- Điều hướng tự động bằng Công nghệ Intel® RealSense ™
- Gặp gỡ hướng dẫn viên của bảo tàng AI, người có thể sàng lọc COVID-19
- Cấu hình đa máy ảnh với Intel RealSense Lidar Camera L515
- Intel RealSense Depth Camera D435 ứng dụng vào Game
- Intel RealSense Depth Camera D400 có gì hay?
- Tự động hóa trong lĩnh vực kho hàng - logistics
- Ứng dụng của dòng camera đo chiều sâu?
- Camera 3D Intel® RealSense™ D415
- Camera 3D Intel® RealSense™ D435
- Giới thiệu máy ảnh độ sâu LiDAR độ phân giải cao nhỏ nhất thế giới - Camera Intel® RealSense ™ LiDAR L515
- Camera sở hữu công nghệ quét 3D - Intel RealSense
- Chiến thuật nào cho bạn để sở hữu được một sản phẩm chất lượng
- THINKCENTRE M720e - KHÔNG GIAN LÀM VIỆC THÔNG MINH
- Những thời khắc hạnh phúc trong cuộc sống của bạn sẽ được lưu trữ trọn vẹn, nhờ có IdeaCentre A340-22IWL.
- Phụ kiện hiện đại trải nghiệm tối đa với ThinkPad X1
Bài viết nhiều người xem nhất

(Cập nhật: 23/4/2024)

🔥Công nghệ Nhận Diện Vật Thể và Đo Khoảng Cách với Camera Intel RealSense D435.
(Cập nhật: 19/4/2024)

🔥Thông báo lịch nghỉ lễ Giỗ Tổ Hùng Vương của BrandPC 🔥
(Cập nhật: 16/4/2024)

Bài viết mới nhất
(Cập nhật: 23/4/2024)
🔥Công nghệ Nhận Diện Vật Thể và Đo Khoảng Cách với Camera Intel RealSense D435.
(Cập nhật: 19/4/2024)
🔥Thông báo lịch nghỉ lễ Giỗ Tổ Hùng Vương của BrandPC 🔥
(Cập nhật: 16/4/2024)
Review công nghệ
(Cập nhật: 23/4/2024)
🔥Công nghệ Nhận Diện Vật Thể và Đo Khoảng Cách với Camera Intel RealSense D435.
(Cập nhật: 19/4/2024)
🔥Thông báo lịch nghỉ lễ Giỗ Tổ Hùng Vương của BrandPC 🔥
(Cập nhật: 16/4/2024)
